上肢假肢的科学分类与技术演进
上肢假肢作为弥补肢体功能缺失的重要医疗器具,其分类体系基于解剖学特征、功能需求及控制技术,形成了严谨的科学框架。以下从多维度解析其分类逻辑与技术特点:
一、按截肢部位与解剖结构分类
1. 手指/掌部假肢
针对指骨或掌骨缺失设计,多采用硅胶或树脂材料模拟外观,部分高端产品通过微型关节实现指间关节的被动屈伸,适用于保留部分掌骨功能的患者。例如,3D打印定制的掌指关节假肢可精准匹配残端骨结构,提升抓握时的力学传导效率。
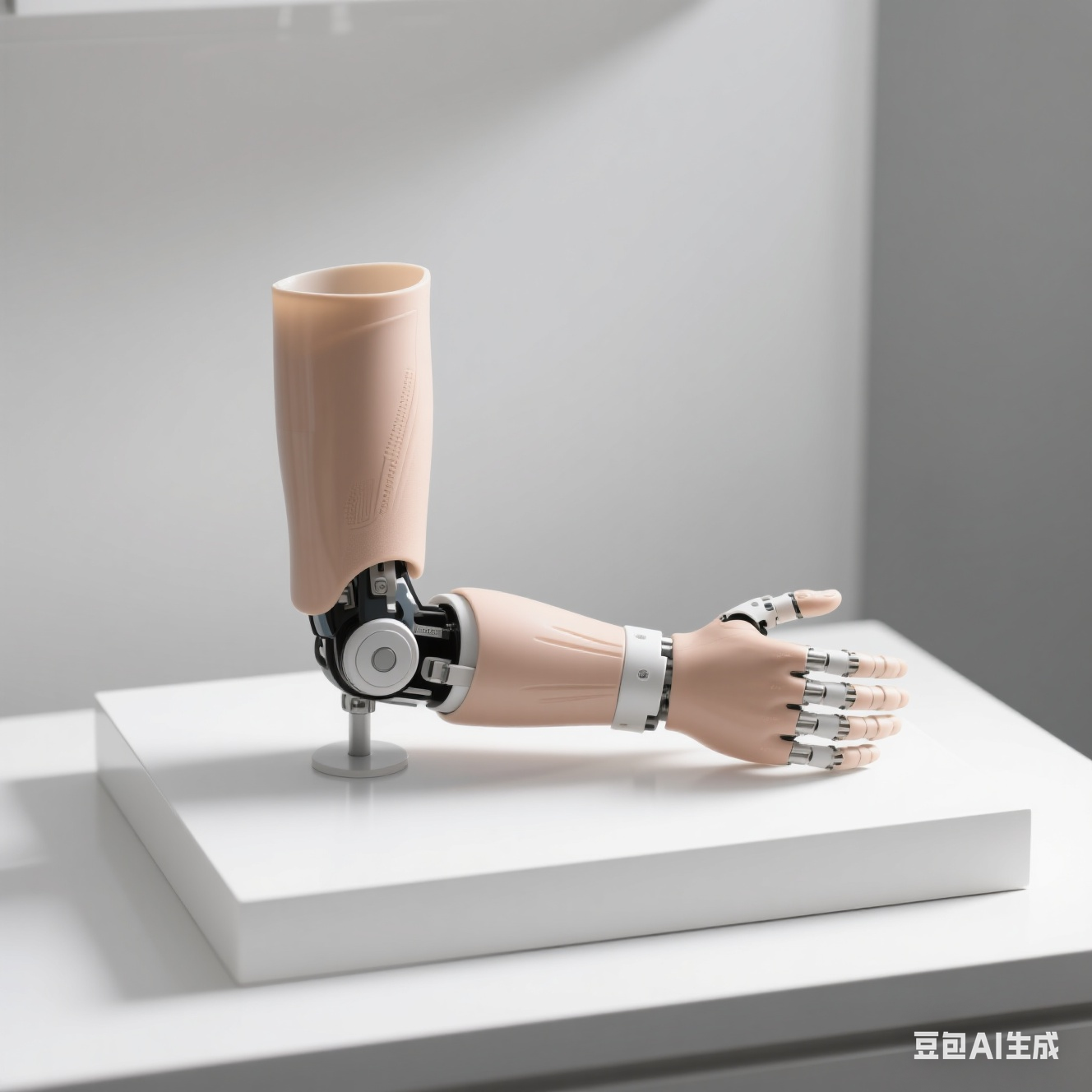
2. 腕部及前臂假肢
覆盖腕关节至肘关节以下的截肢部位,核心在于模拟前臂旋转与手部抓握功能。传统机械假肢通过绳索牵引实现开合,而现代肌电假肢则利用前臂残肢肌肉(如肱桡肌、尺侧腕屈肌)的电信号控制假手动作,抓握力可达3-5kg。
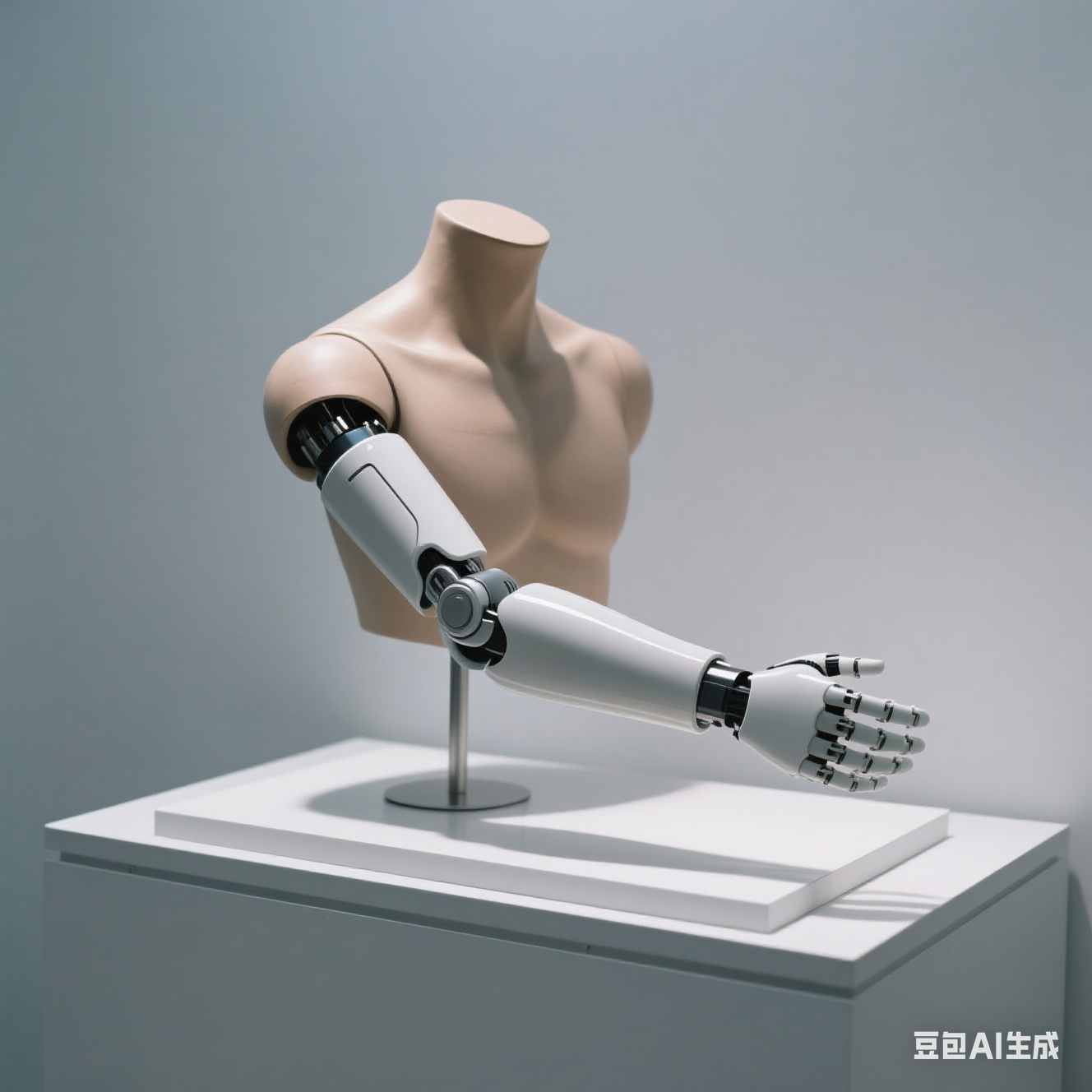
3. 上臂及肩离断假肢
针对肘关节以上至肩部的截肢,需解决肩关节活动与多自由度控制问题。肩离断假肢通常采用肩带悬吊系统,配合胸背肌电信号控制肘关节屈伸及假手动作,高端产品可通过肩胛骨运动传感器实现肩部外展等复合动作。

二、按功能与应用场景分类
1. 装饰性假肢
以仿生外观为核心,采用硅胶表皮模拟肤色与纹理,内部为轻量化树脂框架。虽功能有限,但通过3D扫描定制可实现毫米级外观匹配,常用于社交场景或对美观要求高的患者。
2. 功能性假肢
侧重实用操作能力,分为:
- 身体动力型:通过肩背运动牵引钢索驱动假手,结构简单但需频繁肢体联动,适合日常轻量操作;
- 肌电控制型:利用表面电极采集肌肉电信号,经放大器转化为电机动作,可实现捏、握、旋等20余种动作模式,典型如 Ottobock Michelangelo 假手,抓握精度可达0.5mm。
3. 运动与职业专用假肢
- 运动假肢采用碳纤维骨架与弹性储能结构,如攀岩专用假肢的钩状末端可承受150kg拉力;
- 工业假肢集成力反馈传感器,可在装配作业中感知物件重量与压力,避免过载损伤。
三、按控制技术与智能化程度分类
1. 机械被动控制
依赖关节阻尼或弹簧实现被动运动,如被动式肘关节仅能在预设角度锁定,适用于残肢运动功能极弱的患者。
2. 肌电与神经接口控制
- 表面肌电技术已发展至多通道实时控制,新型干电极可直接贴合皮肤,无需导电凝胶;
- 侵入式神经接口(如靶向肌肉神经再支配术,TMR)通过将残肢神经与替代肌肉连接,使患者可直接“意念控制”假肢,目前已实现50+自由度的精细动作。
3. 智能集成系统
部分高端假肢嵌入AI算法,如通过惯性传感器识别手势意图,结合云端数据优化动作模式;脑机接口实验性产品已实现通过脑电信号(EEG)直接控制假肢,延迟时间<50ms。
四、材料与制造技术革新
传统假肢多采用铝合金或工程塑料,现代产品则普及碳纤维复合材料(强度重量比提升3倍)与柔性硅胶。3D打印技术实现了残肢个性化适配,如SLS激光烧结工艺可制造孔隙率达40%的轻量化接受腔,兼顾透气性与支撑力。
未来,随着神经工程与柔性电子技术的突破,上肢假肢正向“生物-机械融合”方向发展,目标是实现与健侧肢体等同的运动精度与触觉反馈。
本文科普内容与图片均由豆包AI(2025年6月25日生成)提供支持
