上肢假肢发展与变革:从机械替代到人机融合的技术跨越
上肢假肢的发展始终围绕“还原运动功能、贴近自然感知”的核心目标,历经机械驱动、电子控制到智能仿生的三次技术革命,逐步实现从“工具适配”到“身体延伸”的跨越。以下从技术演进阶段与核心突破展开解析。
一、机械索控时代:功能替代的初步探索(20世纪80年代前)
1. 技术原理:通过肩背带牵引索传递运动力,控制手部开合与关节屈伸,分为随意张开式(弹簧驱动闭合)和随意闭合式(主动控制握力)两类,核心依赖人体残余肢体的机械运动传导 。
2. 代表成果:1921年发明的“都柏林臂”采用爆灯蓝锁装置,通过蚕丝缆绳连接肌肉运动,实现抓握等基础动作,为机械假肢奠定结构基础;我国传统索控式机械手以骨骼式结构为主,具备零位自锁功能,适配腕离断至上臂截肢患者。
3. 局限与突破:仅能完成2-3种固定动作,握力无法精准调控,且肩背带易造成压迫损伤,但其模块化设计理念为后续技术提供了参考。
二、肌电控制时代:电子驱动的精准升级(20世纪80年代-2020年)
1. 核心技术:采集残肢肌肉收缩产生的肌电信号,经处理器转化为假肢动作指令,实现“意念-信号-动作”的直接联动,信号识别准确率可达95%以上。
2. 临床应用:奥托博克8E38梅奥加速感应肌电手集成SUVA感应系统,通过指间传感器感知物体滑落趋势并自动调增握力,可安全抓取鸡蛋等易碎物品,且重量轻、抗干扰能力强,适配腕离断患者 。
3. 技术特征:实现2-3个主动自由度,支持握取、勾取等精细化动作,配合锂电池供电,单次充电可满足全天使用需求,解决了传统机械假肢的操作局限。

三、智能仿生时代:感知融合的革命性突破(2021年至今)
1. 神经接口创新:《Science Robotics》2025年研究提出磁感肌动系统,通过残肢肌肉内植入2毫米直径磁体,利用磁场变化解析运动意图,在人类受试者中实现手掌开合、力度控制等连续动作,延迟较肌电系统降低40% 。
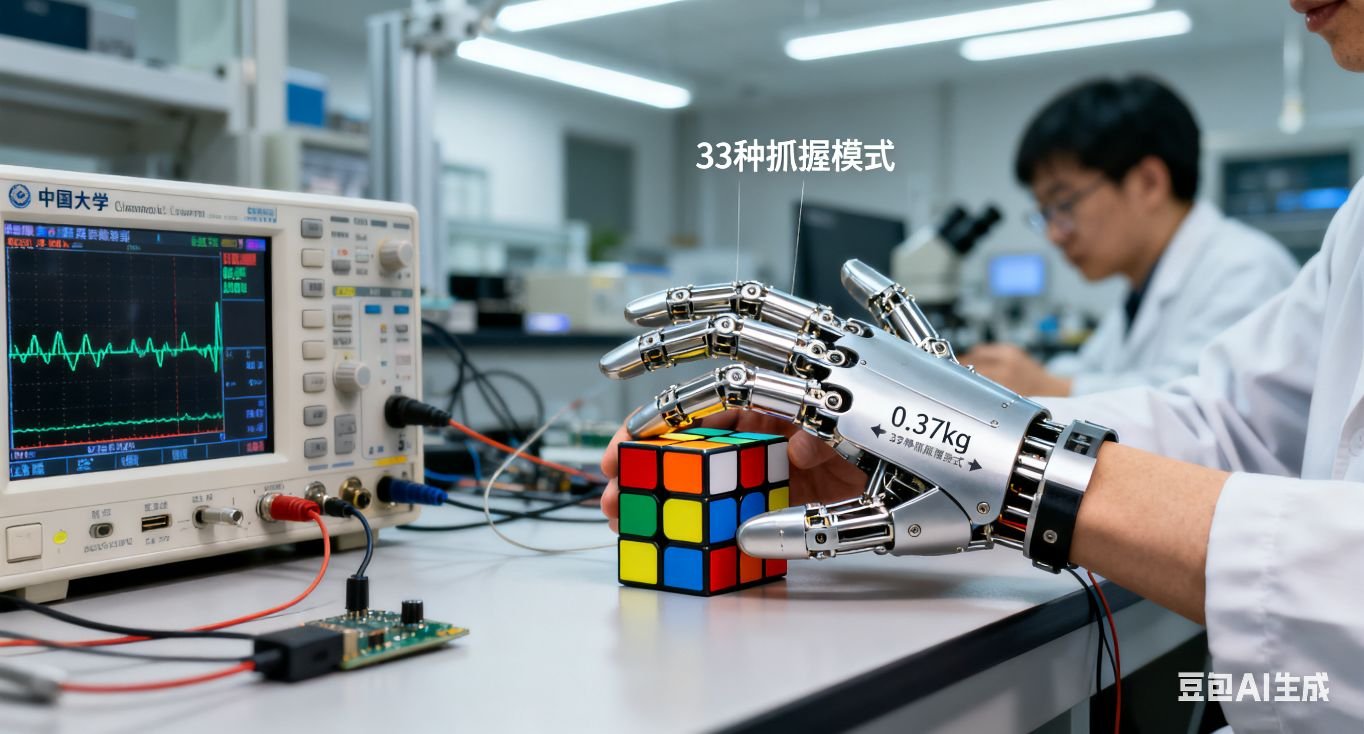
2. 高自由度与触觉反馈:中国科大2025年推出的医疗级仿生手,以形状记忆合金为人工肌肉,实现19个主动自由度,重仅0.37千克,可复现33种抓握动作;配合解兆谦团队的触觉皮肤器件,能通过振动反馈传递物体硬度与纹理信息,让患者精准感知抓取力度 。
3. 国产化与政策落地:强脑科技BrainCo智能仿生手实现量产,价格降至十余万元(仅为海外同类产品的1/3-1/5),浙江已将其纳入医保,报销比例达50%,推动高端假肢普及。
总结
上肢假肢已从“机械工具”进化为“人机协同系统”,神经接口与触觉反馈技术正打破“有动作无感知”的壁垒。未来随着材料轻量化(如碳纤维复合材)与AI算法优化,有望实现更自然的动作预判与感官融合,而政策支持将加速尖端技术的临床落地。
本文科普内容与图片均由豆包AI(2025年9月26日生成)提供支持
